
Самолет без крыльев или «летающая ванна»

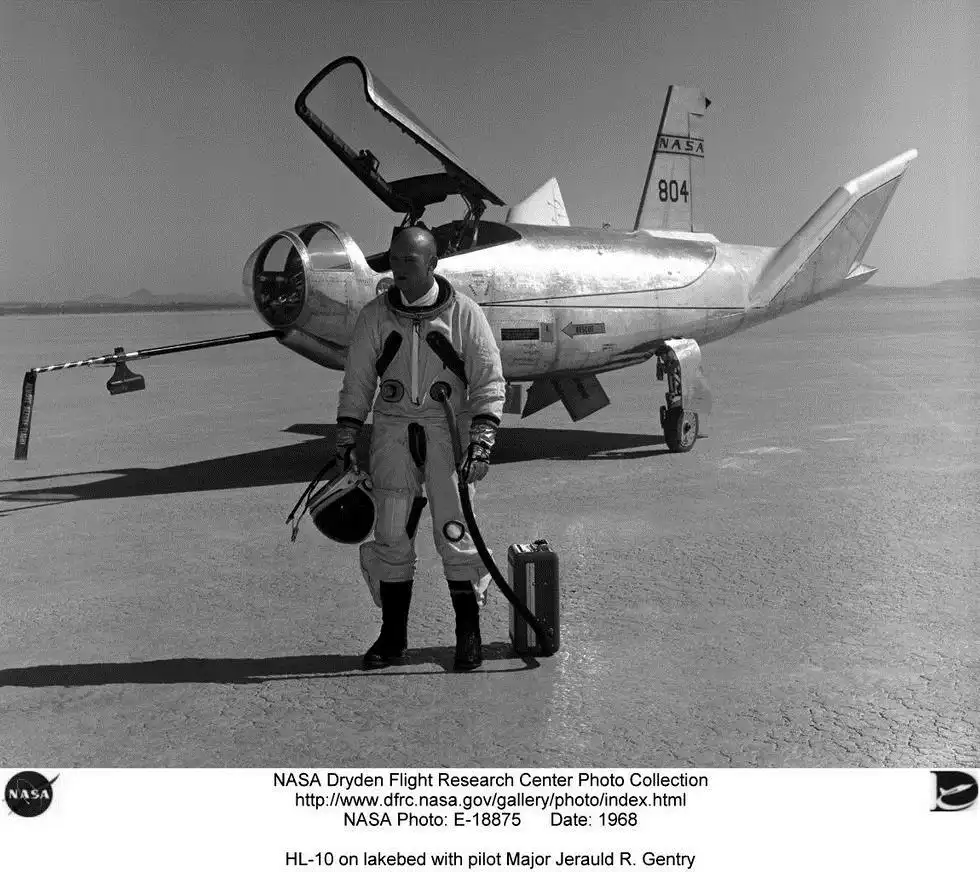
Northrop HL-10 – один из 5 летательных аппаратов летно-исследовательского центра НАСА Эдвардс (Драйда, штат Калифорния). Данные машины были построены для изучения и проверки возможностей безопасного маневрирования и посадки аппарата с низким аэродинамическим качеством после возвращения из космоса. Исследования с использованием HL-10 и других подобных аппаратов проводились в июле 1966 – ноябре 1975 года.
На основе теоретических исследований в начале 1950-х годов наиболее оптимальной формой для головной части перспективных баллистических ракет признали затупленный носовой конус. При входе в атмосферу возникающий перед аппаратом с такой головной частью отсоединенный скачок уплотнения значительно снижает тепловые нагрузки и позволяет увеличить массу боезаряда за счет уменьшения толщины теплозащитных покрытий.

Специалисты NACA, принимавшие участие в данных работах, выяснили, что данная зависимость сохраняется и для полуконусов. Также они выявили и другую особенность: при гиперзвуковом обтекании разница давления потока на нижнюю и верхнюю поверхность создается подъемная сила, которая существенно увеличивает маневренность летательного аппарата при сходе с орбиты.

Аппараты с несущим корпусом (данная схема получила такое название) по своим планирующим характеристикам занимают промежуточное положение между баллистическими капсулами и орбитальными самолетами. Кроме того, использование в составе пилотируемых кораблей спускаемых капсул требует значительных затрат на запуск и возвращение. К достоинствам «несущих корпусов» отнести высокое конструктивное совершенство, возможность многоразового применения, более низкая стоимость разработки в сравнении с традиционными ВКС и т.п.
Специалисты Лаборатории им. Эймса, (в дальнейшем Центр Эймса), была рассчитана модель аппарата в виде затупленного полуконуса, имеющего плоскую верхнюю поверхность. Для путевой устойчивости предполагали использовать два вертикальных киля, которые продолжают обводы фюзеляжа. Возвращаемому космическому аппарату такой конфигурации дали название М2.
Аналогичные исследования вели в Центре Лэнгли. Сотрудники просчитали несколько схем для ВКС с несущим корпусом. Наиболее перспективным из них был проект HL-10 («Horizontal Landing»; 10 – порядковый номер предложенной модели). Аппарат HL-10 имел почти круглую в миделе верхнюю поверхность с тремя килями, плоское, немного выгнутое днище.
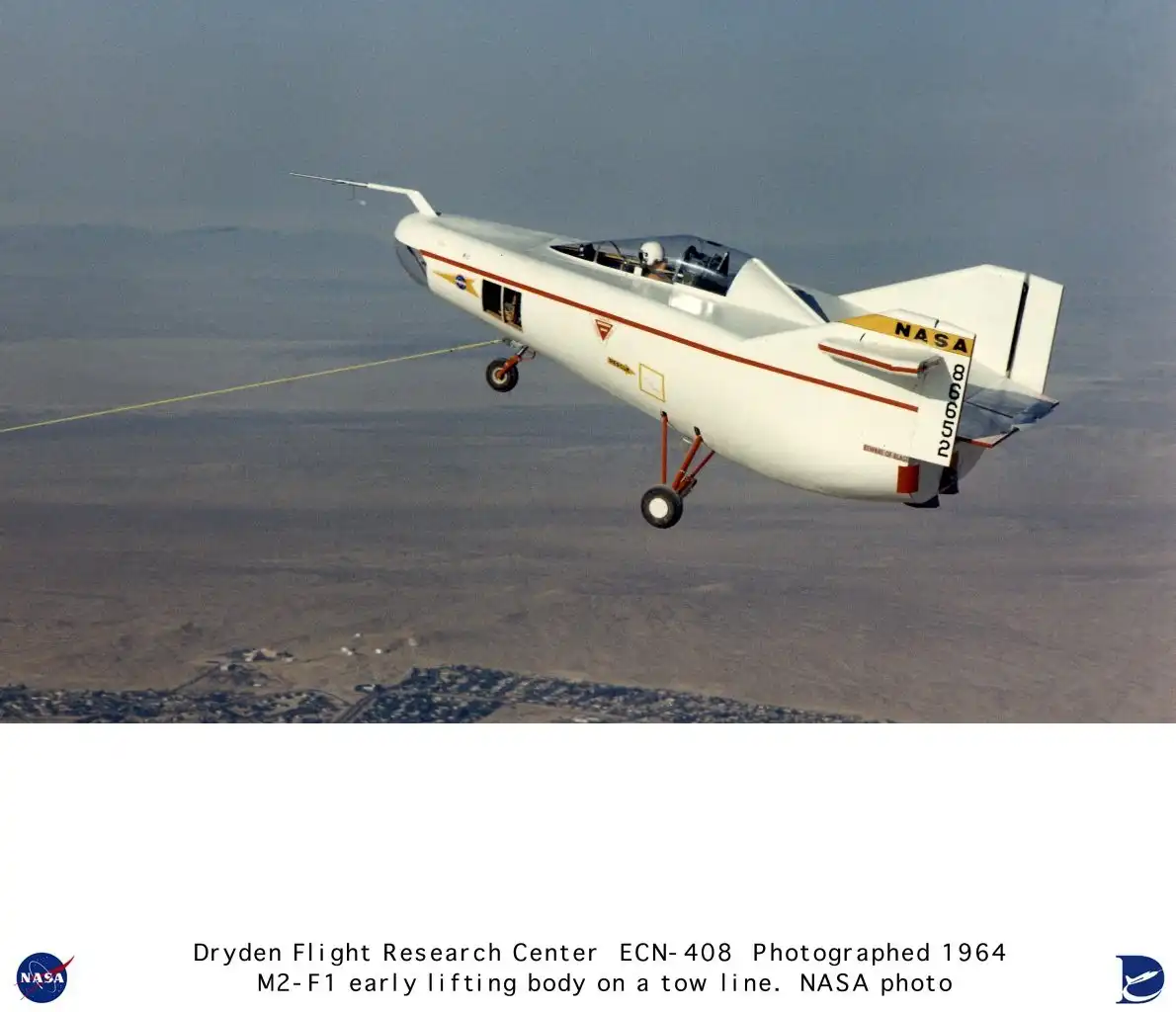
Учитывая высокие характеристики аппаратов NASA совместно с военно-воздушными силами в 1961 году рассмотрело предложения по их использованию в лунной программе для возвращения астронавтов. Однако проекты приняты не были. Несмотря на сокращение финансирования на экспериментальные проекты, данные работы продолжались благодаря усилиям энтузиастов. Один авиамоделист изготовил масштабную модель аппарата и провел бросковые испытания. Реальные успехи позволили продемонстрировать записи испытаний руководству Центров Драйдена и Эймса. Первый выделил 10000 долларов из резервных фондов на изготовление полномасштабного аппарата а второй согласился провести аэродинамические испытания. Аппарату дали обозначение M2-F1.

Шестиметровая модель изготавливалась из алюминиевых трубок (силовая конструкция) и фанеры (корпус). На верхней кромке хвостовой части монтировалась пара элевонов. Внешние алюминиевые кили оснащались рулями направления. Хорошие результаты продувок дали возможность приступить к рулежным испытаниям. Но отсутствие подходящего средства для разгона вынудило приобрести «Понтиак» с форсированным двигателем, обеспечивающий разгон 450-кг модели до 160—195 км/ч. Элементы управления имели низкую эффективность и не обеспечивали требуемой стабилизации изделия. Проблему решили путем отказа от центрального киля и усовершенствования управляющих поверхностей.
В ряде прогонов модель поднималась над поверхностью земли на высоту 6 м. Успех испытаний позволил участникам проекта уговорить директора Центра Драйдена отцепить от автомобиля аппарат для самостоятельного планирования. После этого начались бросковые испытания модели, аппарат буксировался самолетом С-47 на высоты 3—4 км. Первый планирующий полет состоялся 16 августа 1963 года. В целом M2-F1 продемонстрировал хорошую устойчивость и управляемость.

Эффектный полет нового аппарата, а также низкая стоимость выполненных работ позволили расширить работы по данной тематике.
В середине 1964 года американское аэрокосмическое агентство NASA заключило с компанией «Northrop» договор на постройку двух бескрылых цельнометаллических многоразовых аппаратов с несущим корпусом. Новым аппаратам присвоили обозначения HL-10 и M2-F2, отличавшихся профилем несущего корпуса.

По внешнему облику M2-F2 в основном повторяла M2-F1: полуконус с верхней плоской поверхностью оснащался парой вертикальных килей без внешних элевонов, рули направления могли использоваться в качестве тормозных щитков. Чтобы расширить обзор кабину пилота сместили вперед, а носок имел остекление. Для снижения сопротивления и улучшения условий обтекания корпус модели несколько удлинили. В хвостовой части M2-F2 разместили подфюзеляжный щиток для управления по тангажу, верхнюю поверхность корпуса завершала пара щитков-элевонов, обеспечивавших в противофазе управление по крену.
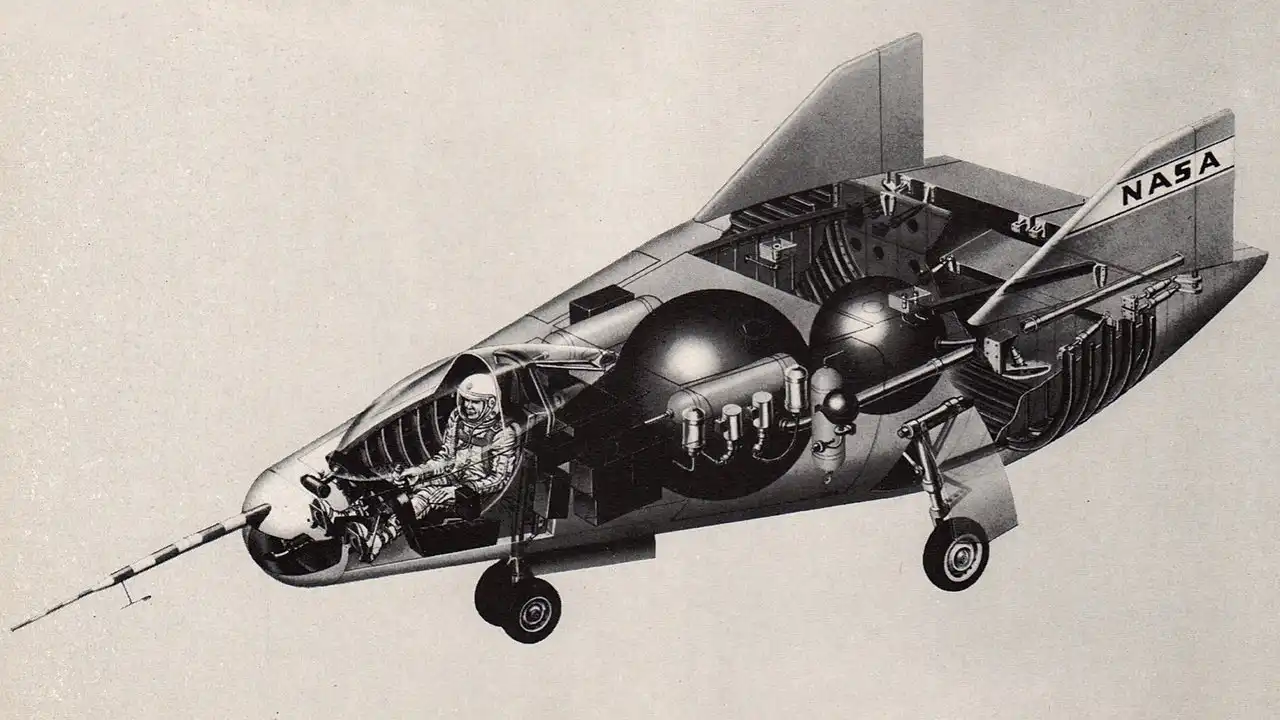
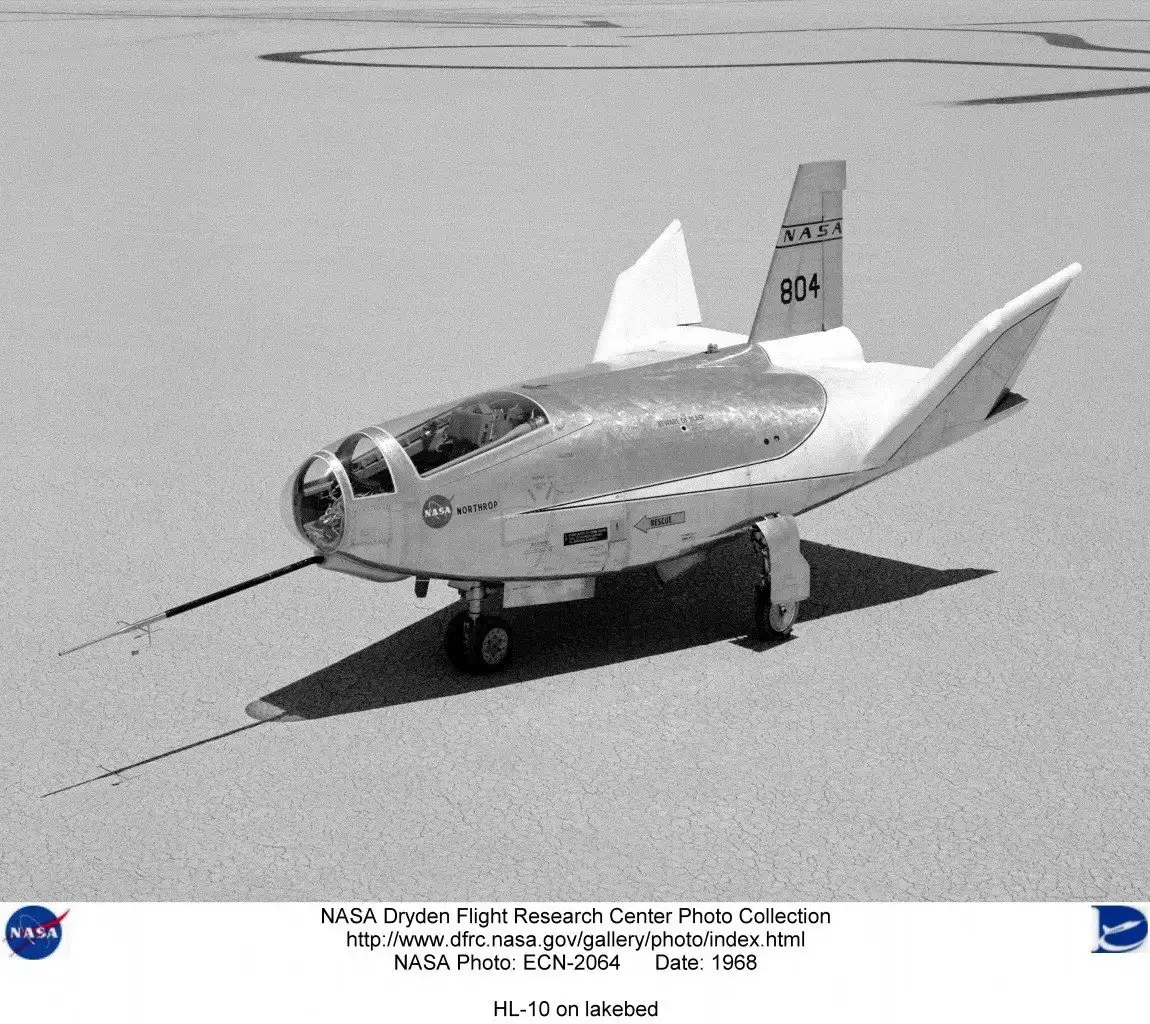
Корпус Northrop HL-10 представлял собой перевернутый полуконус с закругленной верхней частью фюзеляжа и плоским днищем. Кроме того имелся центральный киль. В хвостовой части устанавливалось два элевона трапециевидной формы с небольшими щитками. На внешних килях смонтировали балансировочные панели, а центральный киль – разрезной руль направления. Балансировочные панели и щитки элевонов применялись для стабилизации только во время транс- и сверхзвукового полета. При планировании после активного участка на скорости М=0,6—0,8 их фиксировали во избежание резкого снижения аэродинамического качества во время посадки. Расчетная скорость приземления должна была составлять около 360 км/ч.

Поскольку ракетопланы разрабатывались в достаточно жестких финансовых ограничениях, то для экономии средств аппараты комплектовались готовыми узлами и элементами: основное шасси взяли с истребителя F-5, катапультируемое кресло— истребителя F-106, передняя опора — самолета Т-39.
Приборное оборудование летательных аппаратов также отличалось простотой — во время первых полетов на них даже отсутствовали датчики пространственного положения. Основные измерительные приборы акселерометр, высотомер, датчики скорости, скольжения и угла атаки.
Оба аппарата оснащались двигателем XLR-11 (тяга 3,6 т), непродолжительное время применявшимся на самолете Х-15. Чтобы увеличить дальность полета при аварийной посадке на M2-F2 и HL-10 монтировались вспомогательные жидкостные ракетные двигатели, работавшие на перекиси водорода.
Топливные баки моделей при выполнении бросковых испытаний заполнялись водой массой 1,81 тонны.
12 июля 1966 года состоялся первый планирующий полет M2-F2. Модель массой 2,67 тонны была отделена от В-52 на высоте 13500 м при скорости М=0,6 (697 км/ч). Длительность автономного полета составляла 3 мин 37 сек. 10 мая 1967 года произошла аварийная посадка. Причиной потери управления стал «голландский шаг», во время которого угол крена составил 140 градусов.
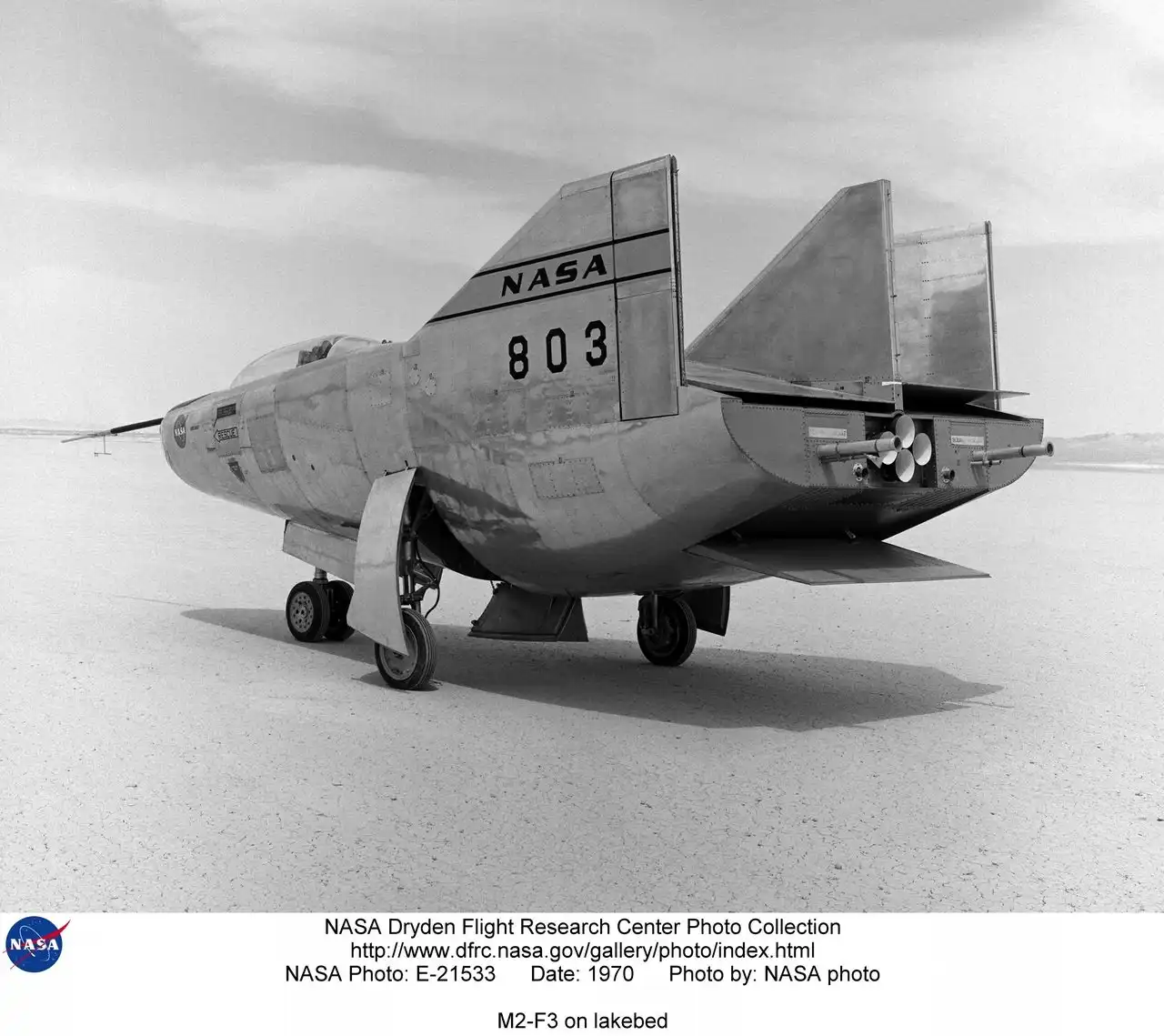
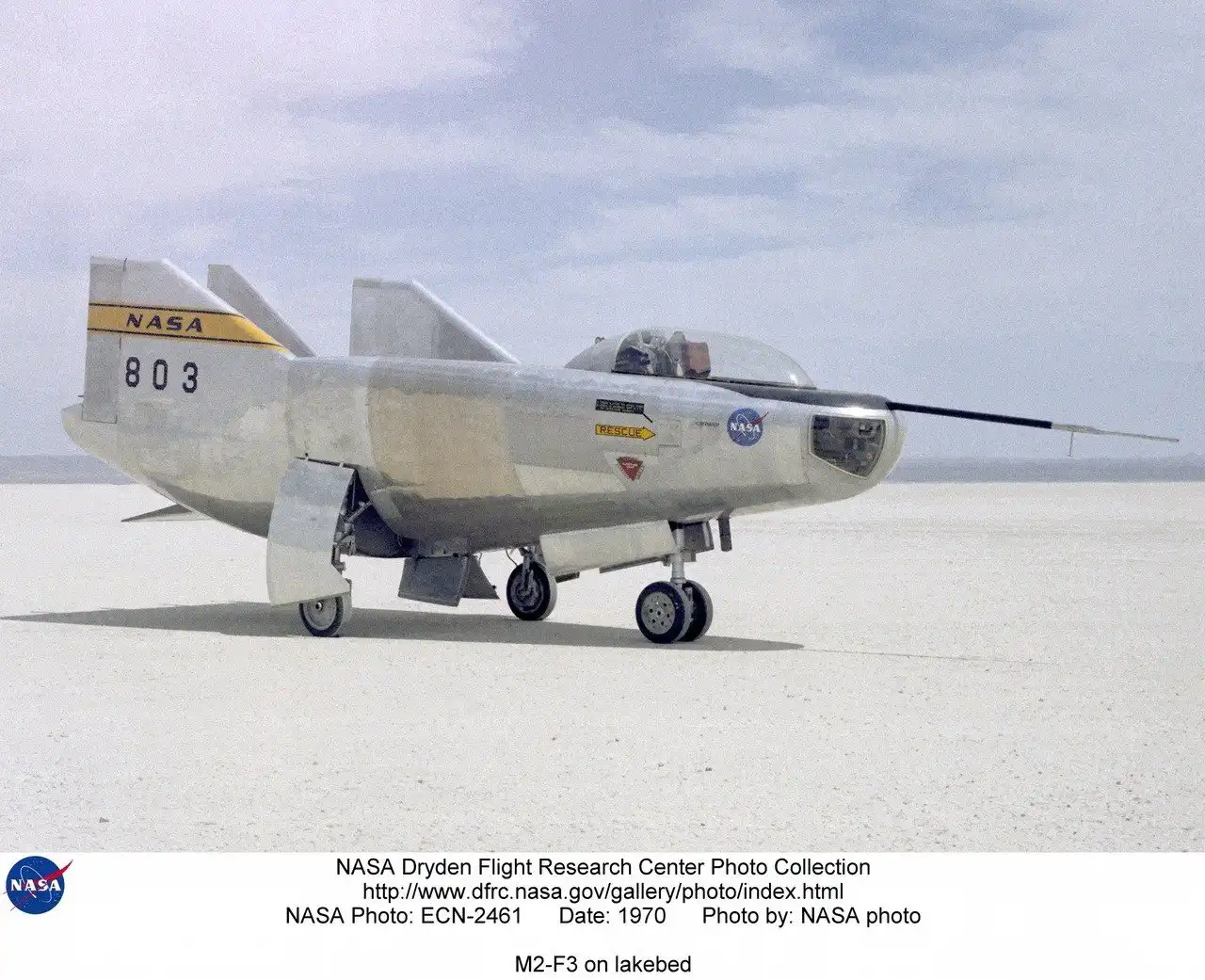
Полуразрушенный аппарат решили восстановить, доработав конструкцию. Чтобы обеспечить поперечную устойчивость на модели, которая получила обозначение M2-F3, установили центральный киль и блоки реактивных двигателей системы управления.
Бросковые испытания были возобновлены в июне 1970 года. Спустя полгода состоялся первый полет с включением маршевого жидкостного ракетного двигателя. На заключительном этапе испытаний, завершившихся в 1972 году, M2-F3 использовался для решения различных вспомогательных задач, в числе которых была и отработка системы дистанционного управления в рамках программы «Спейс Шаттл». Также оценивались летные характеристики модели при предельных высотно-скоростных режимах полета.

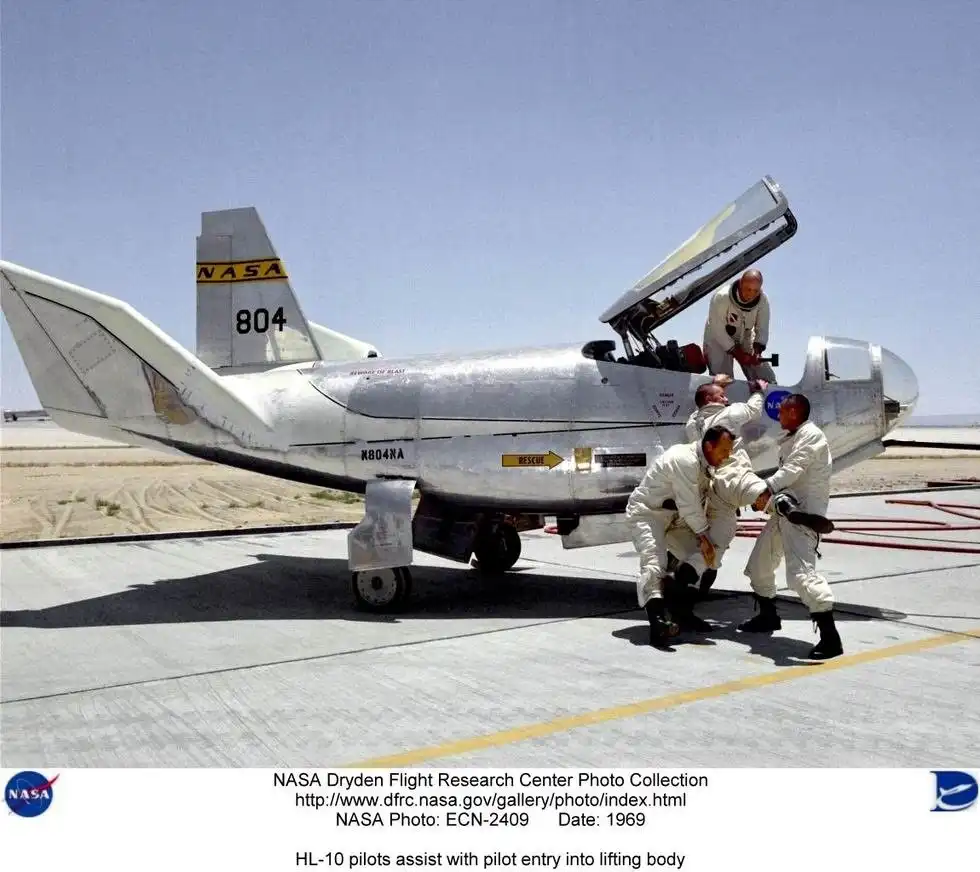
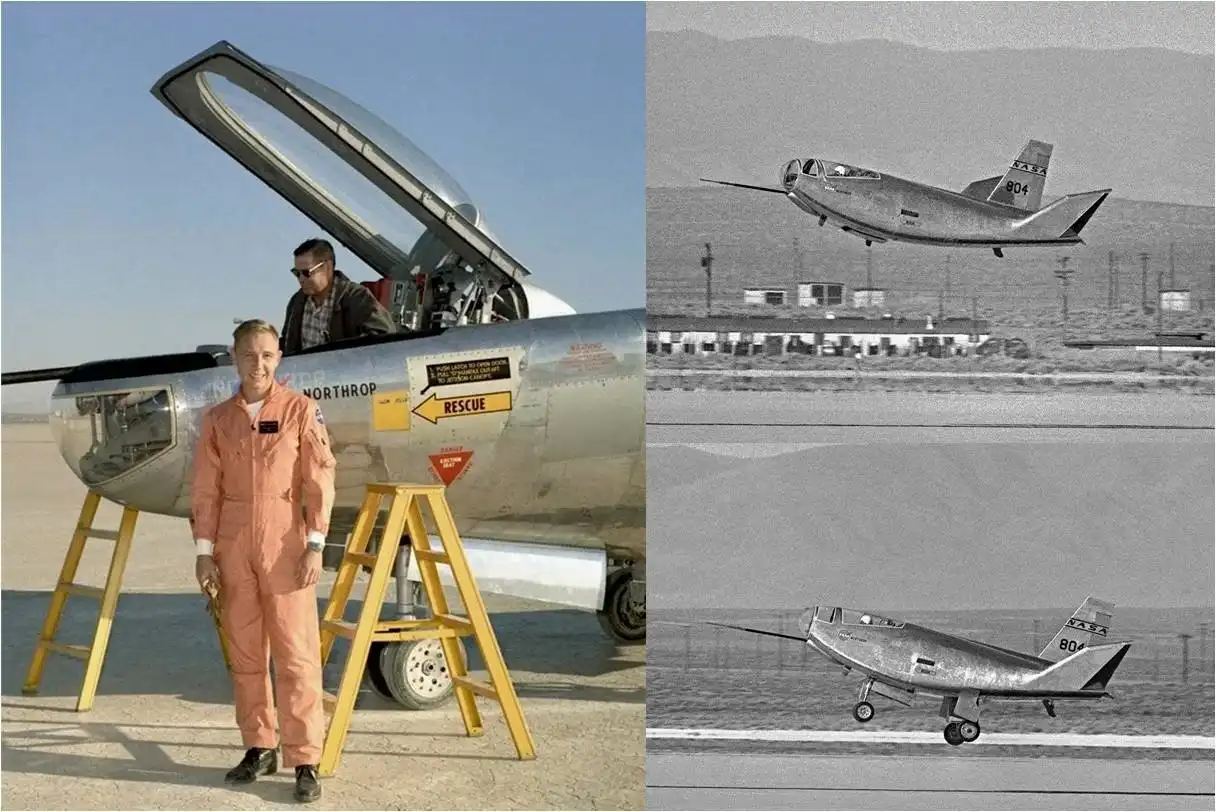
В декабре 1966 года начались бросковые испытания аппарата HL-10. Для них также использовался В-52. Первый же автономный полета было осложнено серьезными проблемами — управляемость в поперечном направлении была крайне неудовлетворительной, эффективность элевонов при разворотах резко падала. Недостаток устранили существенной доработкой внешних килей, которые формировали поток над управляющими поверхностями.
Весной 1968 года планирующие полеты Northrop HL-10 продолжились. Первый запуск маршевого жидкостного ракетного двигателя состоялся в октябре 1968 года.

Аппарат HL-10 также использовался в интересах «Спейс Шаттл». Последние два полета аппарата, выполненные летом 1970 года, были посвящены отработке посадки при включенной силовой установкой. В этих целях XLR-11 заменили тремя жидкостными ракетными двигателями на перекиси водорода.
Эксперимент в целом посчитали успешным — работавшие при посадке двигатели уменьшили угол глиссады с 18 до 6 градусов. Однако пилот аппарата отметил что несмотря на работу наземных средств наведения, возникли некоторые сложности при определении момента включения ракетных двигателей.
За весь период испытаний HL-10 выполнил 37 стартов. При этом модель установила рекордные для ракетопланов с несущим корпусом показатели высоты полета (27,5 км) и скорости (М=1,86).
Тактико-технические характеристики:
Длина – 6,45 м;
Высота – 2,92 м;
Размах крыла – 4,15 м;
Площадь крыльев – 14,9 м²;
Масса пустого – 2397 кг;
Масса полного – 2721 кг;
Максимальная взлетная масса – 4540 кг (топливо – 1604 кг);
Силовая установка – четырехкамерный ракетный двигатель Reaction Motors XLR-11 (тяга до 35,7 кН);
Дальность полета – 72 км;
Практический потолок – 27524 м;
Максимальная скорость – 1976 км/ч;
Коэффициент тяги на единицу массы 1:0,99;
Нагрузка на крыло – 304,7 кг/м²;
Экипаж – 1 человек.
Длина – 6,45 м;
Высота – 2,92 м;
Размах крыла – 4,15 м;
Площадь крыльев – 14,9 м²;
Масса пустого – 2397 кг;
Масса полного – 2721 кг;
Максимальная взлетная масса – 4540 кг (топливо – 1604 кг);
Силовая установка – четырехкамерный ракетный двигатель Reaction Motors XLR-11 (тяга до 35,7 кН);
Дальность полета – 72 км;
Практический потолок – 27524 м;
Максимальная скорость – 1976 км/ч;
Коэффициент тяги на единицу массы 1:0,99;
Нагрузка на крыло – 304,7 кг/м²;
Экипаж – 1 человек.






[media=http://www.youtube.com/watch?v=5
0dDWT48b9M&feature=player_embedded]
[media=http://www.youtube.com/watch?fea
ture=player_embedded&v=EYkOp41GVCo]
0dDWT48b9M&feature=player_embedded]
[media=http://www.youtube.com/watch?fea
ture=player_embedded&v=EYkOp41GVCo]
Подготовлено по материалам:
http://www.walkinspace.ru/blog/2010-12-
22-468
http://crimso.msk.ru
http://zona58.ru
И еще представлю вашему вниманию несколько необычных летательных аппарата: вот например Самолет вертикального взлета с хвоста, а вот Самолет — ручка X-3 «Stiletto». Начало эры сверхзвуковой авиации, Летающий блин, Самолет - наоборот и Самолет — бочка.
http://www.walkinspace.ru/blog/2010-12-
22-468
http://crimso.msk.ru
http://zona58.ru
И еще представлю вашему вниманию несколько необычных летательных аппарата: вот например Самолет вертикального взлета с хвоста, а вот Самолет — ручка X-3 «Stiletto». Начало эры сверхзвуковой авиации, Летающий блин, Самолет - наоборот и Самолет — бочка.