Миниатюрная железная дорога Miniatur Wunderland
Потрясающе
:thumbup:

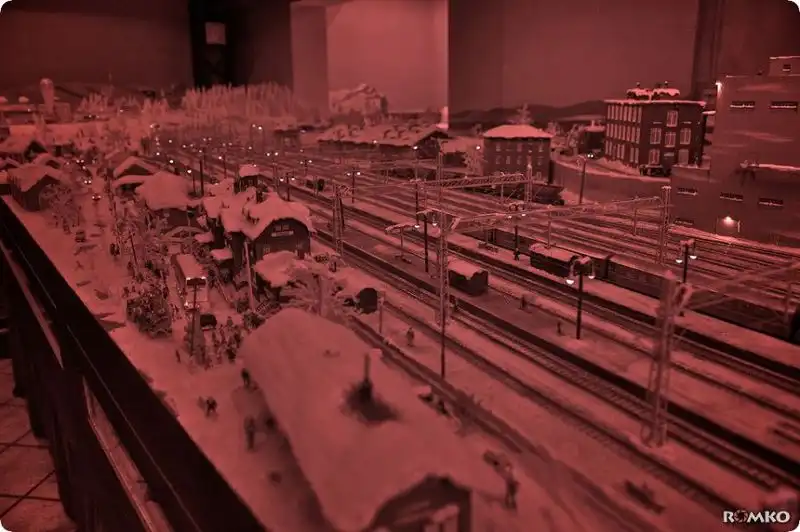
В 2000 году братья Фредерик и Геррит Брауны взялись за масштабный проект — строительство в Гамбурге самой большой в мире игрушечной железной дороги. Девять лет спустя Miniatur Wunderland уже не просто железная дорога, а целый мир в миниатюре, занимающий площадь 1150 кв. м и включающий в себя более 10 тыс. локомотивов и вагонов, 700 поездов, почти 1 тыс. семафоров, 4 тыс. автомобилей, 160 тыс. уникальных фигурок людей, а также несколько кораблей.
Практически все на экспозиции движется и живет собственной жизнью: меняется время суток, на улицах зажигаются и гаснут фонари, поезда, грузовики и баржи везут грузы, полиция ловит нарушителей, пожарные расчеты едут на вызовы, люди гуляют в парках, катаются на фуникулерах, обедают на газонах, купаются, ждут автобуса, катаются на лыжах. Словом, делают то, что и их прототипы из большого мира.
Чтобы создать все это, помимо девяти лет кропотливой работы братьям понадобилось 4 т стали, 700 кг искусственной травы и около $16 млн.
По дорогам Miniatur Wunderland одновременно движутся сотни самых разных моделей автомобилей. Для организации такого интенсивного трафика понадобилась сложная система, в которой вычислительные процессы происходят не только в управляющем компьютере, но и в каждой миниатюрной машине.

В Miniatur Wunderland присутствуют как транспортные средства, движущиеся по заданному циклическому маршруту (мусоровозы или автобусы, например), так и машины, у которых нет пункта назначения. На каждом перекрестке или повороте машина сама решает, куда ей ехать. Правда, перед этим она сообщает головному компьютеру о своих намерениях, а тот помогает ей совершить маневр, не попав в аварию. Эта система работает, когда машина, например, собирается выехать на шоссе. В тот же самый момент другая машина может решить перестроиться в левую полосу и спровоцировать столкновение. Координация со стороны головного компьютера избавляет от подобных ситуаций.


Серьезные трудности у разработчиков возникли при создании кораблей, которые смогли бы не только сами ходить по волнам водоемов Miniatur Wunderland, но и причаливать, а также отплывать в автоматическом режиме. Навигационная система, с помощью которой модели кораблей передвигаются «в открытом море», не подходит для процесса причаливания, потому что она недостаточно точна.
Чтобы корабль причалил без физических повреждений, согласно данным с сайта miniatur-wunderland.com, требуется точность до 1 мм. Только такая точность данных позволит вычислять местоположение корабля и его скорость — параметры, критически необходимые для совершения удачного маневра.


Поначалу разработчики попробовали использовать инфракрасные камеры, такие же как используются для фиксирования фотофиниша в спортивных соревнованиях. Однако различная высота кораблей и уровней воды, оптическое искажение от линз, блики и прочие факторы потребовали написания слишком тяжелого программного обеспечения, которое для учета всех побочных факторов потребовало бы настоящего суперкомпьютера. В итоге после написания 15 тыс. строк этот способ был отброшен как неподходящий.
Тогда было принято решение использовать для маневрирования ультразвуковые устройства. После череды проб и ошибок разработчики создали алгоритм, по которому система делает восемь измерений в секунду и, сравнивая их, выясняет средний результат, точность которого приемлема для осуществления филигранных морских маневров. Одновременно с этим была разработана система с использованием инфракрасного и лазерного излучения, которая способна обеспечить точность до 0,6 мм.
Программное обеспечение для работы с этими системами уже практически закончено. Сейчас оно включает в себе более 75 тыс. строчек кода и вот-вот будет внедрено в корабли, плавающие в водах Miniatur Wunderland.