
Инженеры научили робототехнический захват бросать предметы
Продолжение для этого поста: Молотый кофе обеспечил роботов универсальным захватом
Американские исследователи из университета Корнелла продемонстрировали, как захват робота-манипулятора, используя изменение давления, играет в мини-версии баскетбола, дартса и боулинга.

Игры играми, но в разработке универсального захвата участвует исследовательское агентство Пентагона DARPA (фото John Amend, Cornell University).
Так называемый универсальный захват (Universal Gripper) мы описывали очень подробно в 2010 году. Напомним лишь, что он представляет собой набитый сыпучим материалом шарик, который накачивается воздухом и сдувается, тем самым захватывая предметы. Теперь, по информации IEEE Spectrum, учёные дали «грипперу» новые впечатляющие навыки и представили их на видео.
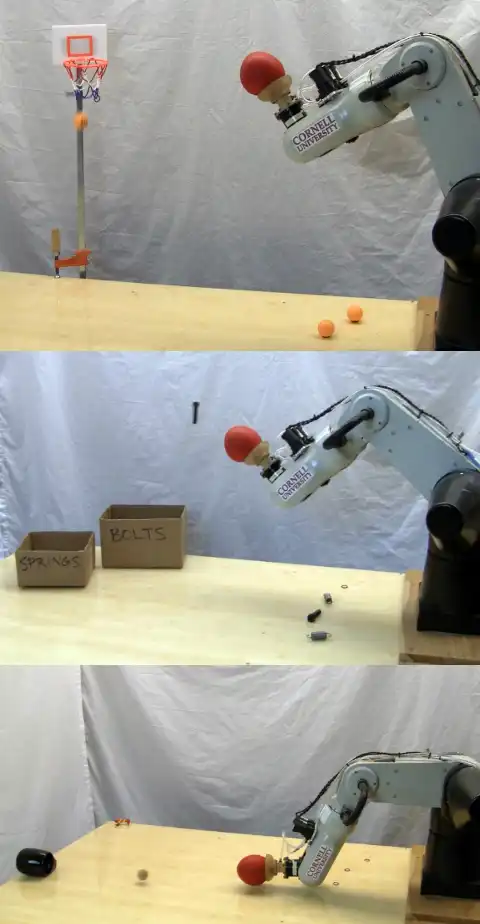
"Используя сочетание положительного и отрицательного давления, Universal Gripper может быстро схватить и отпустить широкий спектр предметов, которые, как правило, сложны для манипуляторов. Это, к примеру, плоские, мягкие объекты и вещи со сложной геометрией, – объясняют инженеры. – За счёт изменения давления захват выиграл до 85% в надёжности, 25% в ошибкоустойчивости и отныне может буквально выстреливать объекты".
Константин Болотов